મેનિપ્યુલેટર રોબોટ સહયોગી Szgh-આર્મ 2442co મેનિપ્યુલેટર રોબોટ લોડિંગ અનલોડિંગ માટે સહયોગી



મેનિપ્યુલેટર રોબોટ સહયોગી Szgh-આર્મ 2442co મેનિપ્યુલેટર રોબોટ લોડિંગ અનલોડિંગ માટે સહયોગી
મુખ્ય શ્રેણી
ઔદ્યોગિક રોબોટ આર્મ / સહયોગી રોબોટ આર્મ / ઇલેક્ટ્રિક ગ્રિપર / બુદ્ધિશાળી એક્ટ્યુએટર / ઓટોમેશન સોલ્યુશન્સ
અરજી
SCIC Z-આર્મ કોબોટ્સ એ હળવા વજનના 4-અક્ષ સહયોગી રોબોટ્સ છે જેમાં ડ્રાઇવ મોટર અંદર બનેલી છે, અને હવે તેમને અન્ય પરંપરાગત સ્કારા જેવા રીડ્યુસર્સની જરૂર નથી, જેના કારણે ખર્ચ 40% ઓછો થાય છે. SCIC Z-આર્મ કોબોટ્સ 3D પ્રિન્ટિંગ, મટિરિયલ હેન્ડલિંગ, વેલ્ડીંગ અને લેસર કોતરણી સહિતના કાર્યોને સાકાર કરી શકે છે. તે તમારા કાર્ય અને ઉત્પાદનની કાર્યક્ષમતા અને સુગમતાને મોટા પ્રમાણમાં સુધારવામાં સક્ષમ છે.
સુવિધાઓ

ઉચ્ચ ચોકસાઇ
પુનરાવર્તનક્ષમતા
±0.02 મીમી
મોટો પેલોડ
૫ કિલો
મોટો આર્મ સ્પાન
JI અક્ષ 220 મીમી
J2 અક્ષ 200 મીમી
સ્પર્ધાત્મક કિંમત
ઔદ્યોગિક સ્તરની ગુણવત્તા
Cસ્પર્ધાત્મક કિંમત
સંબંધિત વસ્તુઓ



સ્પષ્ટીકરણ પરિમાણ
SCIC Z-Arm 2442B ને SCIC ટેક દ્વારા ડિઝાઇન કરવામાં આવ્યું છે, તે હલકો સહયોગી રોબોટ છે, પ્રોગ્રામ અને ઉપયોગમાં સરળ છે, SDK ને સપોર્ટ કરે છે. વધુમાં, તે અથડામણ શોધને સપોર્ટ કરે છે, એટલે કે, માનવ સ્પર્શ કરતી વખતે તે આપમેળે બંધ થઈ જશે, જે સ્માર્ટ માનવ-મશીન સહયોગ છે, સુરક્ષા ઉચ્ચ છે.
| Z-આર્મ 2442B સહયોગી રોબોટ આર્મ | પરિમાણો |
| ૧ અક્ષીય હાથની લંબાઈ | ૨૨૦ મીમી |
| ૧ અક્ષ પરિભ્રમણ કોણ | ±90° |
| 2 અક્ષીય હાથની લંબાઈ | ૨૦૦ મીમી |
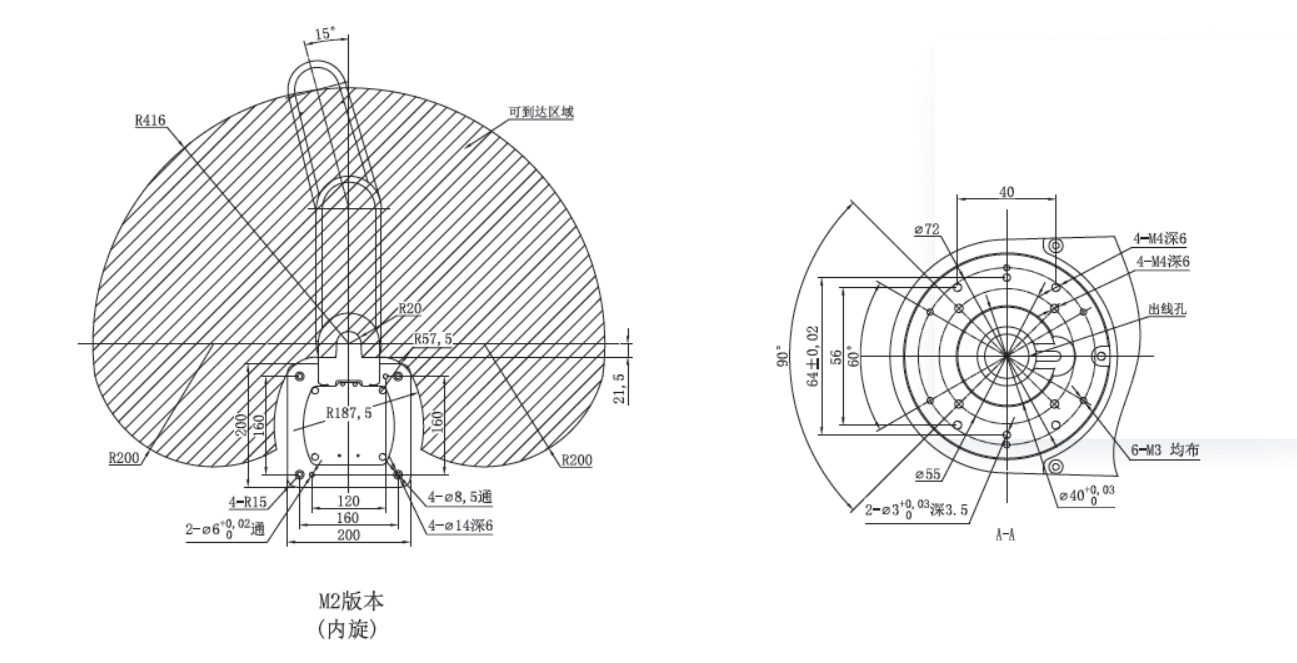
| 2 અક્ષ પરિભ્રમણ કોણ | ±૧૬૪° (વૈકલ્પિક: ૧૫-૩૪૫ ડિગ્રી) |
| Z અક્ષ સ્ટ્રોક | ૨૪૦ (ઊંચાઈ કસ્ટમાઇઝ કરી શકાય છે) |
| R અક્ષ પરિભ્રમણ શ્રેણી | ±૧૦૮૦° |
| રેખીય ગતિ | ૧૬૦૦ મીમી/સેકન્ડ (પેલોડ ૪ કિગ્રા) |
| પુનરાવર્તનક્ષમતા | ±0.02 મીમી |
| માનક પેલોડ | ૪ કિલો |
| મહત્તમ પેલોડ | ૫ કિલો |
| સ્વતંત્રતાની ડિગ્રી | 4 |
| વીજ પુરવઠો | 220V/110V50-60HZ 48VDC પીક પાવર 200W ને અનુકૂલિત કરો |
| સંચાર | ઇથરનેટ |
| વિસ્તરણક્ષમતા | બિલ્ટ-ઇન ઇન્ટિગ્રેટેડ મોશન કંટ્રોલર 24 I/O + અંડર-આર્મ એક્સપાન્શન પૂરું પાડે છે |
| Z-અક્ષ ઊંચાઈમાં કસ્ટમાઇઝ કરી શકાય છે | ૦.૧ મી-૦.૫ મી |
| Z-અક્ષ ખેંચીને શિક્ષણ | / |
| ઇલેક્ટ્રિકલ ઇન્ટરફેસ અનામત | માનક રૂપરેખાંકન: સોકેટ પેનલમાંથી નીચલા આર્મ કવર દ્વારા 24*23awg (અનશીલ્ડેડ) વાયર વૈકલ્પિક: સોકેટ પેનલ અને ફ્લેંજ દ્વારા 2 φ4 વેક્યુમ ટ્યુબ |
| સુસંગત HITBOT ઇલેક્ટ્રિક ગ્રિપર્સ | ઇ-ઇએફજી-8એસ/ઝેડ-ઇએફજી-12/ઝેડ-ઇએફજી-20/ઝેડ-ઇએફજી-20એસ/ઝેડ-ઇએફજી-20એફ/Z-ERG-20C/Z-EFG-30/Z-EFG-50/Z-EFG-100 નો પરિચય |
| શ્વાસ લેતો પ્રકાશ | / |
| બીજા હાથની ગતિ શ્રેણી | માનક: ±164° વૈકલ્પિક: 15-345deg |
| વૈકલ્પિક એસેસરીઝ | / |
| પર્યાવરણનો ઉપયોગ કરો | આસપાસનું તાપમાન: 0-45°C ભેજ: 20-80% RH85 (હિમ નહીં) |
| I/O પોર્ટ ડિજિટલ ઇનપુટ (અલગ) | 9+3+ ફોરઆર્મ એક્સટેન્શન (વૈકલ્પિક) |
| I/O પોર્ટ ડિજિટલ આઉટપુટ (અલગ) | 9+3+ ફોરઆર્મ એક્સટેન્શન (વૈકલ્પિક) |
| I/O પોર્ટ એનાલોગ ઇનપુટ (4-20mA) | / |
| I/O પોર્ટ એનાલોગ આઉટપુટ (4-20mA) | / |
| રોબોટના હાથની ઊંચાઈ | ૬૮૩ મીમી |
| રોબોટના હાથનું વજન | ૨૪૦ મીમી સ્ટ્રોક નેટ વજન ૨૭ કિગ્રા |
| પાયાનું કદ | ૨૫૦ મીમી*૨૫૦ મીમી*૧૫ મીમી |
| બેઝ ફિક્સિંગ છિદ્રો વચ્ચેનું અંતર | ચાર M8*20 સ્ક્રૂ સાથે 200mm*200mm |
| અથડામણ શોધ | √ |
| ખેંચીને શિક્ષણ | √ |
મોશન રેન્જ M1 વર્ઝન (બહારની તરફ ફેરવો)
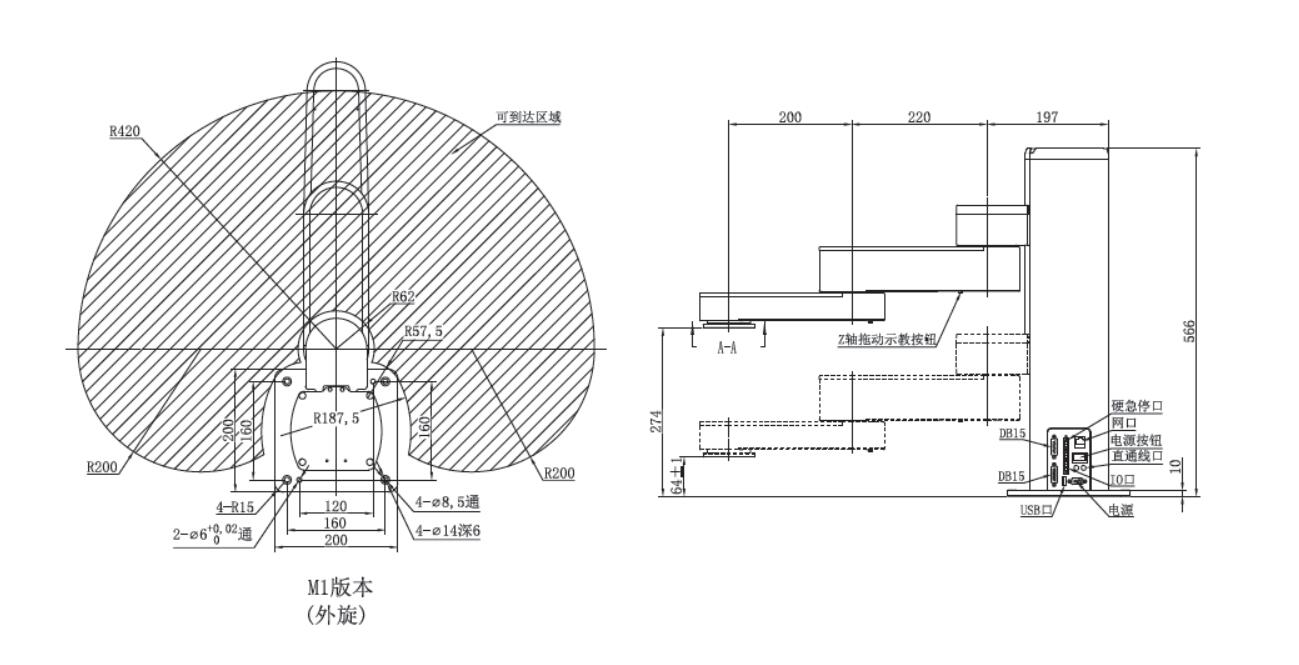
ઇન્ટરફેસ પરિચય

Z-Arm 2442 રોબોટ આર્મ ઇન્ટરફેસ 2 સ્થળોએ સ્થાપિત થયેલ છે, રોબોટ આર્મ બેઝની બાજુ (A તરીકે વ્યાખ્યાયિત) અને અંતિમ આર્મની પાછળ. A પરના ઇન્ટરફેસ પેનલમાં પાવર સ્વીચ ઇન્ટરફેસ (JI), 24V પાવર સપ્લાય ઇન્ટરફેસ DB2 (J2), આઉટપુટ ટુ યુઝર I/O પોર્ટ DB15 (J3), યુઝર ઇનપુટ I/O પોર્ટ DB15 (J4) અને IP એડ્રેસ કન્ફિગરેશન બટન્સ (K5) છે. ઇથરનેટ પોર્ટ (J6), સિસ્ટમ ઇનપુટ/આઉટપુટ પોર્ટ (J7), અને બે 4-કોર સ્ટ્રેટ-થ્રુ વાયર સોકેટ્સ J8A અને J9A છે.
સાવચેતીનાં પગલાં
1. પેલોડ જડતા
ગુરુત્વાકર્ષણનું પેલોડ કેન્દ્ર અને Z અક્ષ ગતિ જડતા સાથે ભલામણ કરેલ પેલોડ શ્રેણી આકૃતિ 1 માં બતાવવામાં આવી છે.

આકૃતિ 1 XX32 શ્રેણી પેલોડ વર્ણન
2. અથડામણ બળ
આડા સાંધાના અથડામણ સંરક્ષણનું ટ્રિગર બળ: XX42 શ્રેણીનું બળ 40N છે.
3. Z-અક્ષ બાહ્ય બળ
Z અક્ષનું બાહ્ય બળ 120N થી વધુ ન હોવું જોઈએ.

આકૃતિ 2
4. કસ્ટમાઇઝ્ડ Z અક્ષના ઇન્સ્ટોલેશન માટેની નોંધો, વિગતો માટે આકૃતિ 3 જુઓ.

આકૃતિ 3
ચેતવણી નોંધ:
(1) મોટા સ્ટ્રોકવાળા કસ્ટમાઇઝ્ડ Z-અક્ષ માટે, સ્ટ્રોક વધતાં Z-અક્ષની કઠોરતા ઘટે છે. જ્યારે Z-અક્ષનો સ્ટ્રોક ભલામણ કરેલ મૂલ્ય કરતાં વધી જાય છે, ત્યારે વપરાશકર્તાને કઠોરતાની જરૂરિયાત હોય છે, અને ગતિ મહત્તમ ગતિના 50% થી વધુ હોય છે, ત્યારે રોબોટ હાથની કઠોરતા ઉચ્ચ ગતિએ જરૂરિયાતને પૂર્ણ કરે છે તેની ખાતરી કરવા માટે Z-અક્ષની પાછળ સપોર્ટ સ્થાપિત કરવાની ખૂબ ભલામણ કરવામાં આવે છે.
ભલામણ કરેલ મૂલ્ય નીચે મુજબ છે: Z-ArmXX42 શ્રેણી Z-અક્ષ સ્ટ્રોક >600mm
(2) Z-અક્ષ સ્ટ્રોક વધાર્યા પછી, Z-અક્ષ અને આધારની ઊભીતા ઘણી ઓછી થઈ જશે. જો Z-અક્ષ અને આધાર સંદર્ભ માટે કડક ઊભીતા આવશ્યકતાઓ લાગુ ન પડે, તો કૃપા કરીને ટેકનિકલ કર્મચારીઓનો અલગથી સંપર્ક કરો.
૫.પાવર કેબલ હોટ-પ્લગિંગ પ્રતિબંધિત છે. જ્યારે પાવર સપ્લાયના પોઝિટિવ અને નેગેટિવ પોલ ડિસ્કનેક્ટ થઈ જાય ત્યારે ચેતવણી ઉલટી કરો.
6. પાવર બંધ હોય ત્યારે આડા હાથને નીચે દબાવો નહીં.

આકૃતિ 4
DB15 કનેક્ટર ભલામણ

આકૃતિ 5
ભલામણ કરેલ મોડેલ: ABS શેલ YL-SCD-15M સાથે ગોલ્ડ પ્લેટેડ પુરુષ ABS શેલ YL-SCD-15F સાથે ગોલ્ડ પ્લેટેડ સ્ત્રી
કદ વર્ણન: 55mm*43mm*16mm
(આકૃતિ 5 જુઓ)
રોબોટ આર્મ સુસંગત ગ્રિપર્સ ટેબલ
| રોબોટ આર્મ મોડેલ નં. | સુસંગત ગ્રિપર્સ |
| XX42 T1 | ઝેડ-ઇએફજી-૮એસ એનકે/ઝેડ-ઇએફજી-૧૨ એનકે/ઝેડ-ઇએફજી-૨૦ એનએમ એનએમએ/ઝેડ-ઇએફજી-૨૦એસ/ Z-EFG-30NM NMA પાંચમો અક્ષ 3D પ્રિન્ટીંગ |
| XX42 T2 | Z-EFG-50 ALL/Z-EFG-100 TXA |
પાવર એડેપ્ટર ઇન્સ્ટોલેશન સાઈઝ ડાયાગ્રામ
XX42 રૂપરેખાંકન 24V 500W RSP-500-SPEC-CN પાવર સપ્લાય

રોબોટ આર્મના બાહ્ય ઉપયોગ પર્યાવરણનો આકૃતિ

અમારો વ્યવસાય


ઉત્પાદનોની શ્રેણીઓ
-

મેગમીત એહવે સાથે આર્થિક 6 એક્સિસ રોબોટ આર્મ...
-

6 એક્સિસ મલ્ટી-સ્ટેશન ગ્રિપર હેન્ડલિંગ સ્કારા રોબ...
-
શ્રેષ્ઠ કિંમત 6 એક્સિસ રોબોટ આર્મ મશીન વેલ્ડીંગ રોબ...
-

બુદ્ધિશાળી 6 એક્સિસ CNC રોબોટ આર્મ / મિકેનિકલ આર્...
-

ઓટોમેટિક રોબોટ વેલ્ડીંગ સાધનો વેલ્ડર ઉદ્યોગ...
-
હોટ સેલ રોબોટ આર્મ મેટલ 6-એક્સિસ મિકેનિકલ રોબો...